Pi-Car
The Challenge:
The single greatest risk on the road today is the physical limit of human reaction time. Even the most attentive driver can be too slow to prevent an accident—a limitation that modern computing can overcome. The core challenge this project addresses, therefore, is engineering an autonomous system that makes split-second decisions with a precision and speed that humans simply cannot match, with the ultimate goal of making our roads safer.
The Solution:
To match this challenge I created what I call Pi-Car. A mini robotic vehicle that runs on a Raspberry Pi Platform and 4 18650 Battery Cells. The Pi-Car was originally designed to be operated from a simple yet powerful DUALSHOCK 4 PlayStation controller via bluetooth. Designed to be up-scaled to install a camera on the front to perform simple autonomous vehicle functions. Utilizing the DUALSHOCK 4 was a step to show how it is possible.
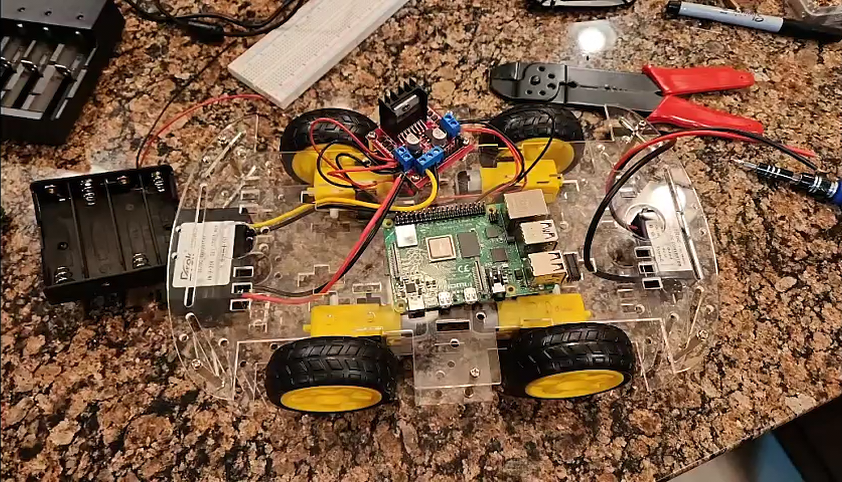
The Pi-Car chassis and core electronics, shown here without the battery bank to provide a clear view of the component layout, wiring, and modular design.
A successful "power-on" test of the Pi-Car's autonomous drive system. This video shows the vehicle's software sending its first commands to the motor controller, achieving wheel spin without any manual input. This was a critical test to validate the entire software-to-hardware signal path before beginning mobile testing.